


通過CANopen轉Modbus TCP網關的伺服系統
通過CANopen轉Modbus TCP網關的伺服系統,我們能夠實現CANopen協議與Modbus TCP協議之間的無縫轉換,從而為伺服電機的通訊和控制帶來更大的便利和靈活性。
首先我們可以通過CANopen協議與伺服電機進行通訊。CANopen協議是一種先進的、高效的通訊協議,它基于CAN總線技術,能夠實現設備之間的快速、穩定通訊。在CANopen協議中,從站設備需要配置控制字、速度、模式等參數,主站設備可以通過發送控制指令來精確控制從站設備的運轉。
然后,我們可以通過Modbus TCP協議與網關進行通訊。Modbus TCP協議是一種廣泛應用的工業自動化通訊協議,它基于TCPIP網絡協議,可以實現設備之間的遠程通訊和控制。在Modbus TCP協議中,從站設備需要配置IP地址、端口號等參數,主站設備可以通過發送Modbus指令來讀寫從站設備的寄存器,從而實現對從站設備的精確控制。
通過CANopen轉Modbus TCP網關,我們能夠實現CANopen協議與Modbus TCP協議之間的轉換。網關可以配置為CANopen從站和Modbus主站,從而與伺服電機進行通訊和控制。在網關的配置軟件中,我們可以設置CANopen從站的參數和Modbus主站的參數,包括波特率、奇偶校驗、數據位、停止位、站地址等。同時,我們還可以手動修改寄存器起始地址,實現不同伺服電機的控制。
使用Modbus主站軟件可以讀寫從站設備的參數。在Modbus主站軟件中,我們可以發送Modbus指令來讀寫從站設備的寄存器,從而實現對伺服電機的精確控制。例如,圖1是用modbuspoll通過對伺服讀取電機的狀態字;圖2給伺服下入,功能碼為16(寫入多寄存器)第一個寄存器是控制字依次寫入寫入7-6-F,第二、三寄存器是速度值,第四寄存器是模式選擇寫入0300。這樣,當伺服電機在使能后即可按照輸入速度運轉。總的來說,通過CANopen轉Modbus TCP網關的伺服系統,我們能夠實現伺服電機的高效通訊和控制。這種系統具有很高的實用性和靈活性,能夠滿足各種工業自動化應用的需求。




 投訴建議
投訴建議
提交

開疆智能 RS485轉Profibus網關
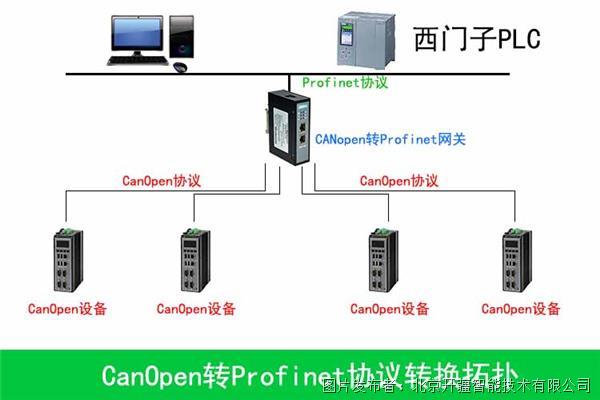
解鎖工業自動化:通過CANopen轉Profinet的無縫對接
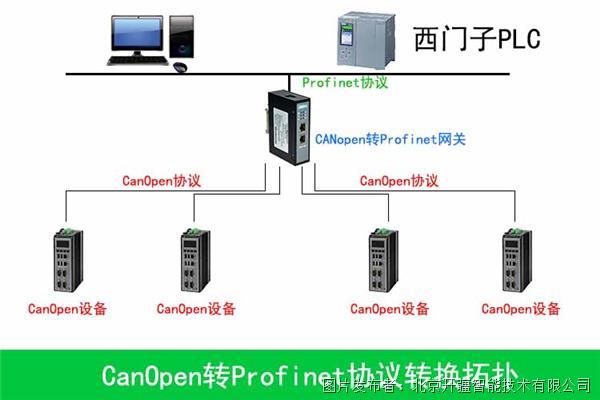
解鎖工業自動化:通過CANopen轉Profinet的無縫對接

開疆智能KJ-PBG-001/Modbus轉Profibus網關

開疆智能232轉Profinet網關