


未來的機器人還需要控制器嗎?
工業4.0參考架構模型(RAMI 4.0)以一個三維模型展示了制造業涉及的所有關鍵要素,在這個模型的等級層次維度(右側水平軸)描述了一個7層的自動化層級,如圖1所示,從下到上依次是:產品,現場設備,控制設備,工作站,運營中心,企業,互聯世界。
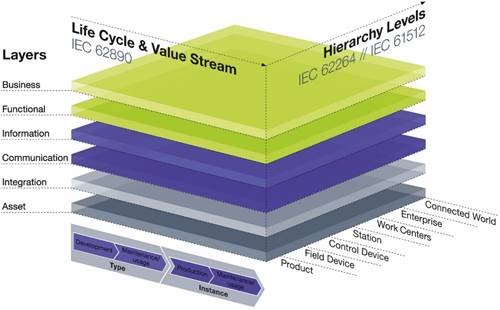
圖1.工業 4.0自動化層級
這種功能分類,和IEC 62264(《企業控制系統集成》)和IEC 61512(《批控制》)標準規定的層級一致。在一個實際的工廠環境中,為了更清晰地分析不同層級對于網絡通信方面要求的不同,我們把現場設備到工作站之間的層級做了進一步的細分,如圖2所示。

圖2.車間自動化模型
根據數據大小、循環周期、傳輸距離、節點數量等特征指標,上圖不同層級間網絡通信的典型數值如下表所示:

表1.車間自動化通信特征和要求
因為不同層級對于網絡通信方面的要求不同,在目前的網絡技術條件下,云端通常只是存儲設備運行數據,并利用深度學習等人工智能算法,實現系統的在線辨識與建模,然后優化設備的運行效率或者維護設備的運行狀態,并不會直接控制驅動器去實現對被控對象的控制。
以云3D打印為例,平臺從云端向3D打印機發送G代碼來控制打印設備,如圖3所示:

圖3.目前云3D打印系統架構
這種架構存在的一個主要問題在于,一旦設備定型采購,無法對控制器硬件進行升級(提供擴展的運算性能)。為提高3D打印的效率和精度,某團隊開發了一種名為“FBS振動補償”的軟件算法,可以有效地將3D打印速度提高一倍,但是,因為某些3D打印機控制器“的計算能力和內存都很低,不能支持用戶的算法。又比如,多臺機器人協同運動(RoboTeam)的場景,受限于目前機器人控制器的計算能力,一般只能支持4臺機器人的同步運動,無法擴展到更多數量的機器人協同運動。
此外,如果現場的設備控制器需要升級或者更換時,整臺設備或者整條生產線都需要停機,進而換上新的設備控制器,這樣就會導致生產中止;為滿足某些高可靠運行要求的場合,需要建立一個冗余的控制平臺(雙機熱備PLC),這種方案成本太高而且工作也非常繁復。
隨著網絡技術(5G,Wi-Fi 6)和網絡化控制理論(預測控制,數據驅動控制)的不斷發展,目前已有所謂的云控制系統(Cloud Control System)的概念,它結合了云計算和網絡化控制的優點,其系統拓撲圖如圖4所示。
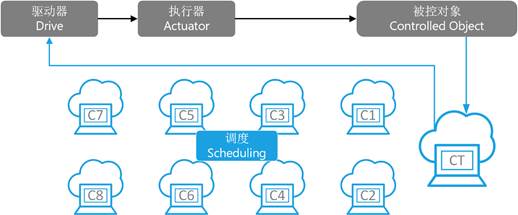
圖4.云端控制系統網絡拓撲圖
在這種架構中,因為云計算是一種具有彈性的服務,使用者無需知道服務提供商的物理位置,只需要有網絡連接,就可以按照需要配置所需的虛擬化資源(計算,軟件,數據訪問和存儲),然后在該虛擬化資源上對各種數據(實時數據,歷史數據)進行分析和處理,進而生成控制系統的控制信號。
最終,留在現場的終端可以簡化成一個單純或者只需具備有限的計算/存儲能力的輸入輸出設備,上文提到的問題,也可以在這種架構中得到解決,比如即便現場設備控制器無法支持運行“FBS振動補償算法”,通過擴展云端控制器的運算能力,也可以提高3D打印機的運行效率,如圖5所示。
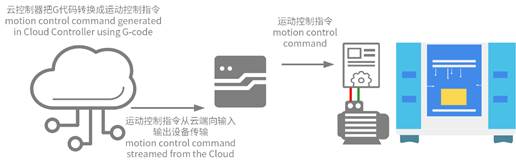
圖5.云控制3D打印系統架構
從運動控制的角度而言,機器人和3D打印機的架構有類似之處,因為控制器的計算能力和內存都很低,從而無法支持新算法的問題。在機器人行業同樣存在這類問題,云控制系統此提供了一種新的解決思路。
盡管云控制系統具有諸多優勢,但是在當前階段,還是面臨許多挑戰,比如:信息傳輸與處理的挑戰,如何在大延遲下保證控制質量和閉環系統的穩定性;控制系統安全性的挑戰,不僅要抵御物理層的隨機干擾和不確定性,更要抵御網絡層有策略有目的的攻擊等。
所以,這種控制架構不會完全改寫業內所熟知的參考架構模型,但在不久的將來,隨著網絡技術和網絡控制的不斷發展,云控制系統將對包括機器人在內的各種設備的發展和各種實際應用起到積極推動作用。




 投訴建議
投訴建議
提交

派拓網絡被Forrester評為XDR領域領導者

智能工控,存儲強基 | 海康威視帶來精彩主題演講

展會|Lubeworks路博流體供料系統精彩亮相AMTS展會

中國聯通首個量子通信產品“量子密信”亮相!

國家重大裝備企業齊聚高交會 中國科技第一展11月深圳舉行